Sunumunda, beyin cerrahı Dr. Galal Elsayed, mekansal bilişimin bu sınırlamayı nasıl ele aldığını gösteriyor. Cerrahlar ameliyat alanına girmeden önce hasta anatomisini üç boyutlu olarak anladığında, ameliyat içi navigasyon daha öngörülebilir hale gelir. Sürükleyici ameliyat öncesi planlama ile endoskopik görselleştirmenin birleşimi, hazırlık ile uygulamayı bağlayan sürekli bir mekansal iş akışı oluşturur.
Ameliyat öncesi mekansal anlayış
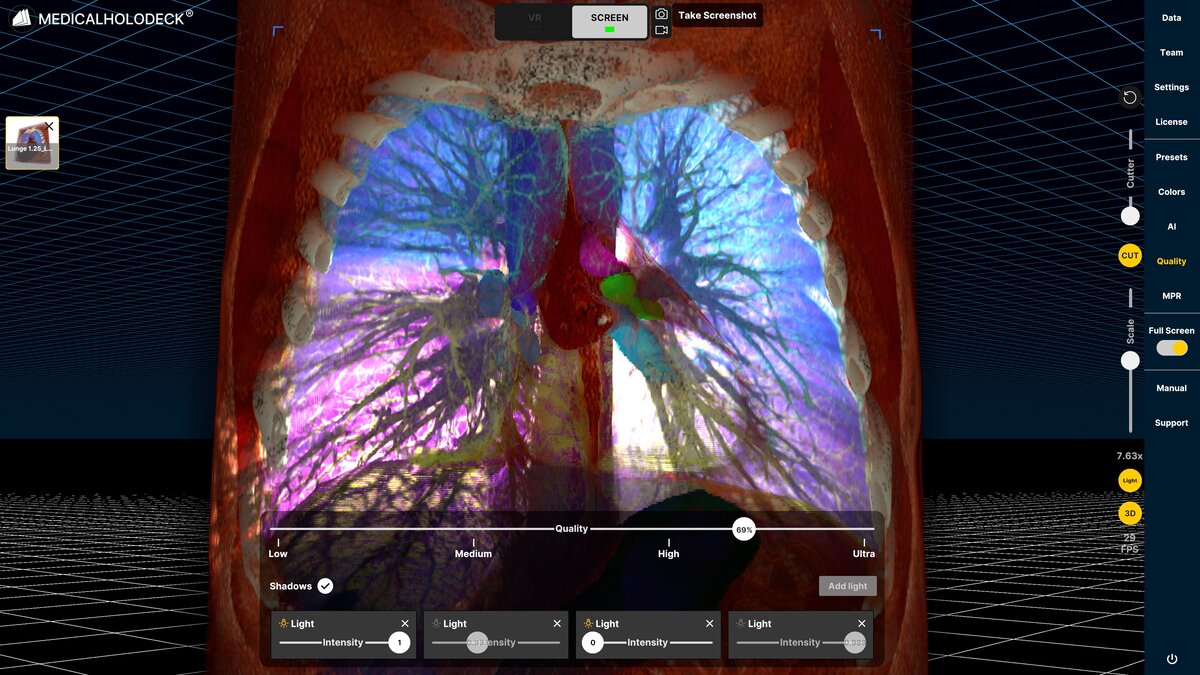
CT ve MR görüntüleri genellikle düz ekranlarda incelenir; bu da cerrahların 2D kesitlerden 3D ilişkileri zihinsel olarak yeniden oluşturmasını gerektirir. Yalnızca küçük bir bölgenin görülebildiği MISS’te bu bilişsel adım oldukça zorludur.
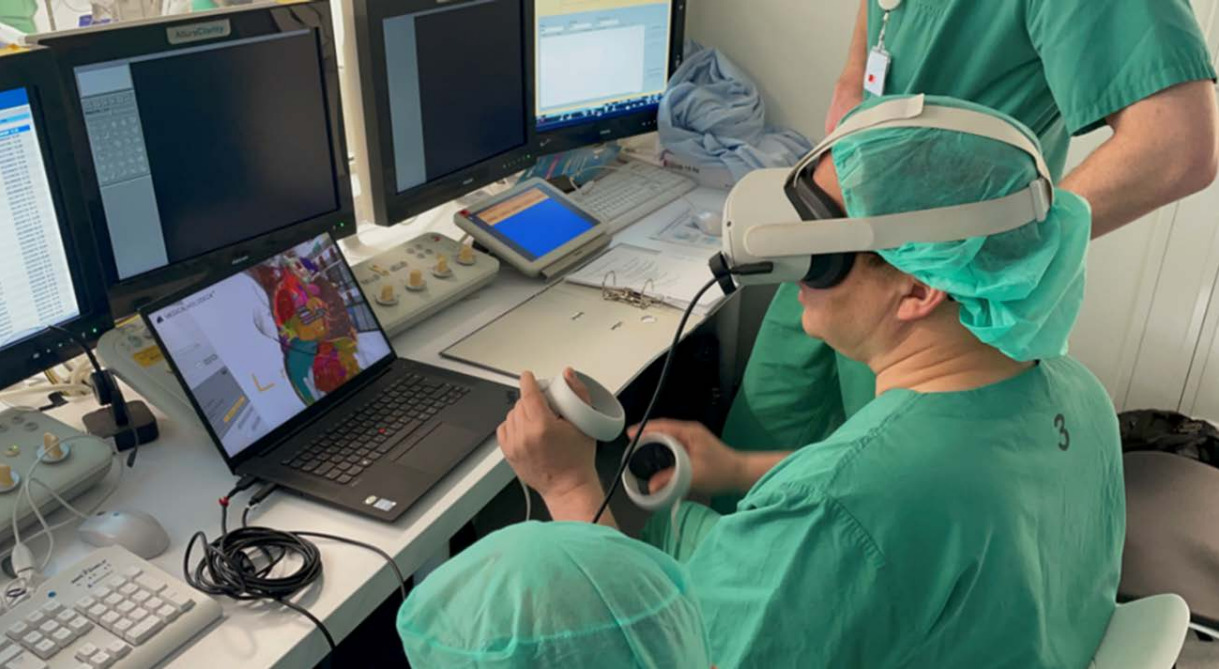
Sürükleyici görselleştirme, hasta-özel görüntülemeyi sanal gerçeklikte keşfedilen etkileşimli 3D modellere dönüştürür. Cerrahlar omurları, diskleri, eklemleri ve sinir yapılarını her açıdan inceleyebilir, cerrahi koridoru simüle edebilir, giriş noktasını belirleyebilir ve deformite veya yer değiştirmiş parçalar gibi varyasyonları öngörebilir. Sonuç, net bir mekansal plandır: erişim yolu, kaçınılması gereken yapılar ve hedefe güvenli şekilde ulaşmak için gereken kemik veya bağ dokusu çıkarımının kapsamı.
Ameliyat sırasında endoskopik gerçeklik
Endoskopi, minimal erişim kanalından gerçek zamanlı görüntü sağlar ancak doğası gereği yereldir. Aynı anda yalnızca küçük bir alan görülebilir ve yön bulma cerrahın içsel mekansal haritasına bağlıdır.
Önceden yapılan VR planlamasıyla bu görüntü bağlam kazanır. Cerrahlar, görünen sınırların ötesinde ne olduğunu ve mevcut görüntünün genel anatomiyle nasıl ilişkili olduğunu bilir. Endoskopik görüntü, daha önce incelenmiş 3D modelle hizalanır ve değişmiş veya dejeneratif omurgalarda bile güvenli navigasyonu destekler.

Galal A. Elsayed, M.D NewYork-Presbyterian/Weill Cornell Medicine’deki Och Spine’de Beyin Cerrahisi Doçenti olan Dr. Elsayed, aynı zamanda Och Spine Queens’te Minimal İnvaziv Omurga Cerrahisi Direktörlüğü yapmaktadır. Klinik odağı, omurga cerrahisinde ileri teknikler üzerine olup, özellikle minimal invaziv ve görüntü kılavuzlu yaklaşımlarla ilgilenmektedir.
Dr. Elsayed ayrıca genişletilmiş gerçeklik (XR) ve mekansal hesaplamayı cerrahi planlama ve eğitime entegre etme konusunda derinlemesine çalışmaktadır ve bu alanlarda hassasiyeti ve hasta sonuçlarını artırmaya yönelik yeni yolların öncüsüdür.
Sürekli bir mekansal iş akışı
Temel yenilik entegrasyondur. Ameliyat öncesi VR keşfi ile ameliyat sırasındaki endoskopi tek bir mekansal süreklilik oluşturur: cerrah önce anatomiyi sanal olarak navigasyonla inceler, ardından bu yolu gerçek hayatta yeniden uygular. Öngörülen anatomi, ameliyat sırasındaki belirsizliğin yerini alır ve bu özellikle karmaşık vakalarda büyük değer taşır.
Eğitim ve tekrarlanabilirlik üzerindeki etki
MISS ileri düzey mekansal akıl yürütme gerektirir. Sürükleyici planlama, eğitimdeki cerrahların ameliyat öncesinde hasta anatomisini tekrar tekrar keşfetmesine olanak tanır; zihinsel modelleri operasyon görüntüleriyle hizalar. Bu da mekansal anlayışı hızlandırır ve öğrenme eğrisini kısaltır.
Standartlaştırılmış 3D planlama tekrarlanabilirliği de artırabilir. Koridorlar ve hedefler paylaşılan bir mekansal ortamda tanımlandığında, yaklaşımlar 2D görüntülerin bireysel yorumuna daha az bağımlı hale gelir; bu da tutarlı sonuçları ve ekip içi iletişimi destekler.
Yapay zeka destekli minimal invaziv iş akışlarına doğru
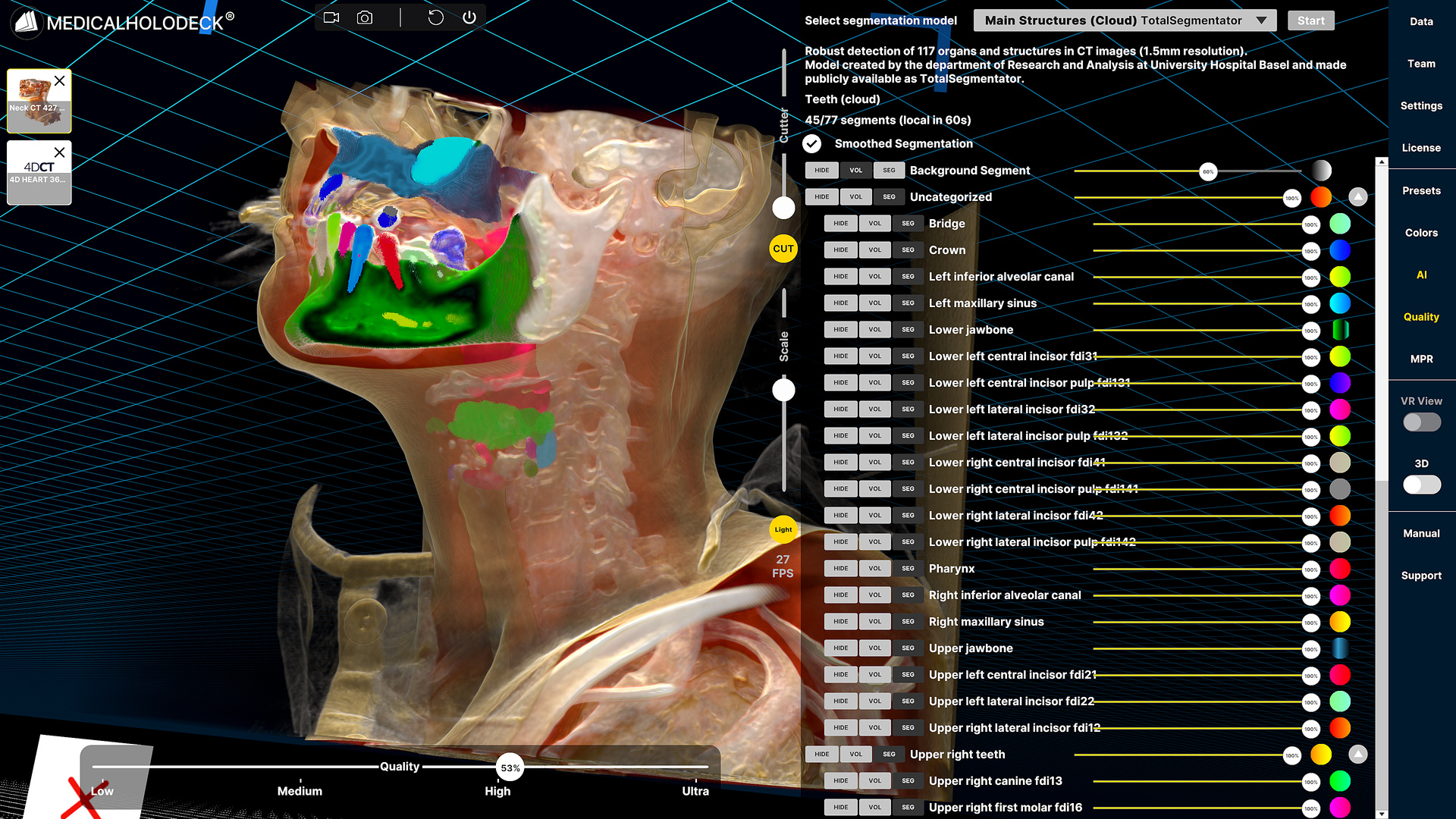
Yapay zeka tabanlı segmentasyon, CT ve MR görüntülerinde omurları, diskleri, sinirleri ve patolojileri otomatik olarak tanımlayabilir; 3D model oluşturmayı hızlandırır ve ilgili anatomiyi öne çıkarır. Bu, akıcı bir iş akışı sağlar: otomatik rekonstrüksiyon, sürükleyici koridor planlama ve planlanan yol ile hizalı ameliyat içi yönlendirme.
Görselleştirmeden cerrahi iş akışına
Mekansal bilişim, görselleştirmeden cerrahinin operasyonel bir bileşenine dönüşmektedir. MISS’te VR planlama ile endoskopik uygulamanın bağlanması, anatomiyi sürekli bir 3D anlayışla kavramayı sağlar; belirsizliği azaltır ve hassasiyeti artırır.
Minimal invaziv omurga cerrahisi her zaman dar koridorları içerir. Mekansal bilişim anatomiyi değiştirmez, ancak cerrahların onu nasıl algıladığını ve içinde nasıl ilerlediğini değiştirir. Planlama ve uygulamanın tek bir mekansal iş akışında entegrasyonu, daha öngörülebilir ve öğretilebilir cerrahiye işaret eder.
Minimal invaziv omurga cerrahisi son derece küçük koridorlar üzerinden gerçekleştirilir. Mekansal yönelim sınırlıdır. Öğrenme eğrisi diktir.
Sunumunda beyin cerrahı Dr. Galal Elsayed, mekansal bilişimin bunu nasıl değiştirebileceğini gösteriyor. Ameliyat öncesi VR planlama ile ameliyat sırasındaki endoskopik görselleştirmenin birleşimi, cerrahların ameliyat alanına girmeden önce anatomiyi net bir 3D anlayışla kavramasını sağlar.
Hasta-özel CT ve MR verileri, en uygun erişim yolunu belirlemek ve anatomik varyasyonları öngörmek için sanal gerçeklikte incelenir. Ameliyat sırasında endoskopi, minimal erişim kanalından gerçek görüntüyü sağlar. Birlikte, planlama ve uygulama tek bir sürekli mekansal iş akışı oluşturur.
Bu yaklaşım belirsizliği azaltır, karmaşık veya deforme olmuş omurgalarda navigasyonu destekler ve genç cerrahlar için öğrenme eğrisini kısaltır. Perspektif nettir: entegre VR planlama, endoskopik cerrahi ve yapay zeka destekli iş akışları minimal invaziv işlemleri daha hassas ve tekrarlanabilir hale getirecektir.
Mekansal bilişim görselleştirmeden cerrahi iş akışına geçiyor.
Daha fazla bilgi için iletişime geçin info@medicalholodeck.com Mart 2026