Dans sa présentation, le neurochirurgien Dr Galal Elsayed montre comment l’informatique spatiale répond à cette limitation. Lorsque les chirurgiens comprennent l’anatomie du patient en trois dimensions avant d’entrer dans le champ opératoire, la navigation peropératoire devient plus prévisible. La planification préopératoire immersive combinée à la visualisation endoscopique crée un flux de travail spatial continu reliant préparation et exécution.
Compréhension spatiale préopératoire
Les examens CT et IRM sont généralement consultés sur des écrans plats, obligeant les chirurgiens à reconstruire mentalement les relations 3D à partir de coupes 2D. Dans la MISS, où seule une petite région est visible, cette étape cognitive est exigeante.
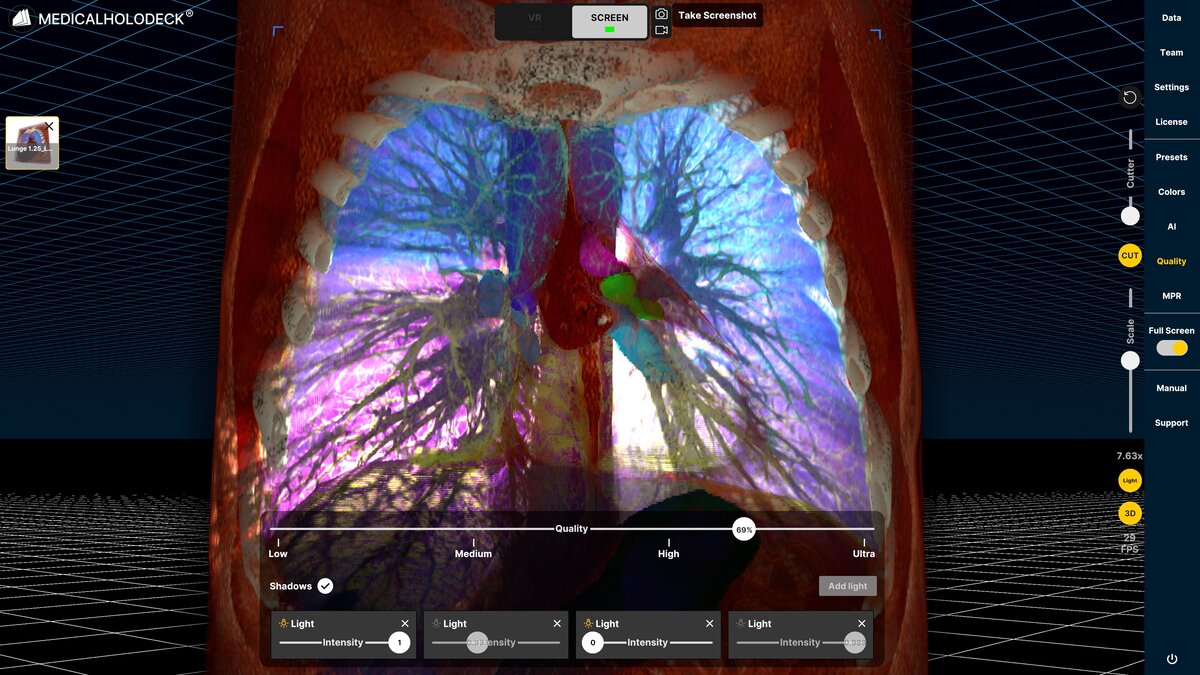
La visualisation immersive transforme les images spécifiques au patient en modèles 3D interactifs explorés en réalité virtuelle. Les chirurgiens peuvent examiner vertèbres, disques, articulations et structures nerveuses sous tous les angles, simuler le corridor chirurgical, définir le point d’entrée et anticiper des variations telles que des déformations ou des fragments migrés. Le résultat est un plan spatial clair : voie d’accès, structures à éviter et étendue de la résection osseuse ou ligamentaire nécessaire pour atteindre la cible en toute sécurité.
Réalité endoscopique peropératoire
L’endoscopie fournit une vue en temps réel à travers un canal d’accès minimal, mais elle est intrinsèquement locale. Seule une petite zone est visible à la fois, et l’orientation dépend de la carte spatiale interne du chirurgien.
Grâce à la planification préalable en VR, cette vue gagne en contexte. Les chirurgiens savent ce qui se trouve au-delà des limites visibles et comment la scène actuelle s’intègre à l’anatomie globale. L’image endoscopique s’aligne avec le modèle 3D exploré auparavant, permettant une navigation sûre même dans des colonnes altérées ou dégénérées.

Galal A. Elsayed, M.D est professeur assistant en neurochirurgie à Och Spine au NewYork-Presbyterian/Weill Cornell Medicine et occupe le poste de directeur de la colonne vertébrale mini-invasive à Och Spine Queens. Son intérêt clinique porte sur des techniques avancées en chirurgie de la colonne vertébrale, avec un intérêt particulier pour les approches mini-invasives et guidées par imagerie.
Le Dr Elsayed est également fortement impliqué dans l'intégration de la réalité étendue (XR) et de l'informatique spatiale dans la planification chirurgicale et l'éducation, ouvrant la voie à de nouvelles méthodes pour améliorer la précision et les résultats pour les patients.
Un flux de travail spatial continu
L’innovation clé est l’intégration. L’exploration VR préopératoire et l’endoscopie peropératoire forment un continuum spatial : le chirurgien navigue d’abord virtuellement dans l’anatomie, puis reproduit ce parcours dans la réalité. L’anatomie anticipée remplace l’incertitude peropératoire, ce qui est particulièrement précieux dans les cas complexes.
Impact sur la formation et la reproductibilité
La MISS exige un raisonnement spatial avancé. La planification immersive permet aux chirurgiens en formation d’explorer à plusieurs reprises l’anatomie du patient avant l’intervention, alignant leurs modèles mentaux avec les vues opératoires. Cela accélère la compréhension spatiale et raccourcit la courbe d’apprentissage.
La planification 3D standardisée peut également améliorer la reproductibilité. Lorsque les corridors et les cibles sont définis dans un environnement spatial partagé, les approches dépendent moins de l’interprétation individuelle des images 2D, ce qui favorise des résultats cohérents et la communication au sein de l’équipe.
Vers des flux de travail mini-invasifs assistés par IA
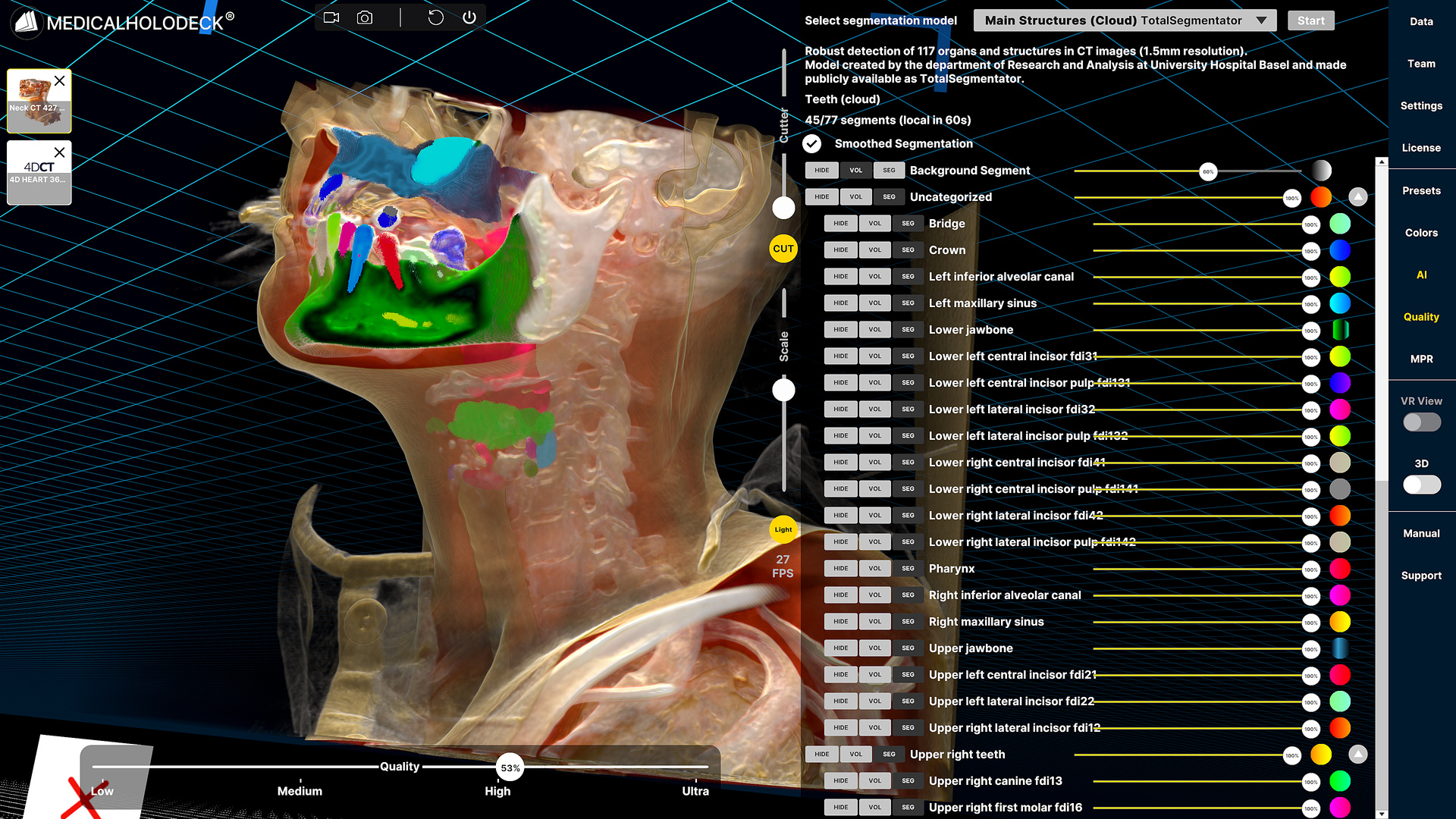
La segmentation basée sur l’IA peut identifier automatiquement vertèbres, disques, nerfs et pathologies dans les CT et IRM, accélérant la création de modèles 3D et mettant en évidence l’anatomie pertinente. Cela permet un flux de travail rationalisé : reconstruction automatisée, planification immersive du corridor et guidage peropératoire aligné sur la trajectoire planifiée.
De la visualisation au flux de travail chirurgical
L’informatique spatiale passe de la visualisation à un composant opérationnel de la chirurgie. Dans la MISS, relier la planification VR à l’exécution endoscopique offre une compréhension 3D continue de l’anatomie, réduisant l’incertitude et améliorant la précision.
La chirurgie mini-invasive de la colonne vertébrale impliquera toujours des corridors étroits. L’informatique spatiale ne modifie pas l’anatomie, mais la manière dont les chirurgiens la perçoivent et la naviguent. L’intégration de la planification et de l’exécution dans un flux de travail spatial unique ouvre la voie à une chirurgie plus prévisible et plus facile à enseigner.
La chirurgie mini-invasive de la colonne vertébrale est réalisée à travers des corridors extrêmement étroits. L’orientation spatiale est limitée. La courbe d’apprentissage est abrupte.
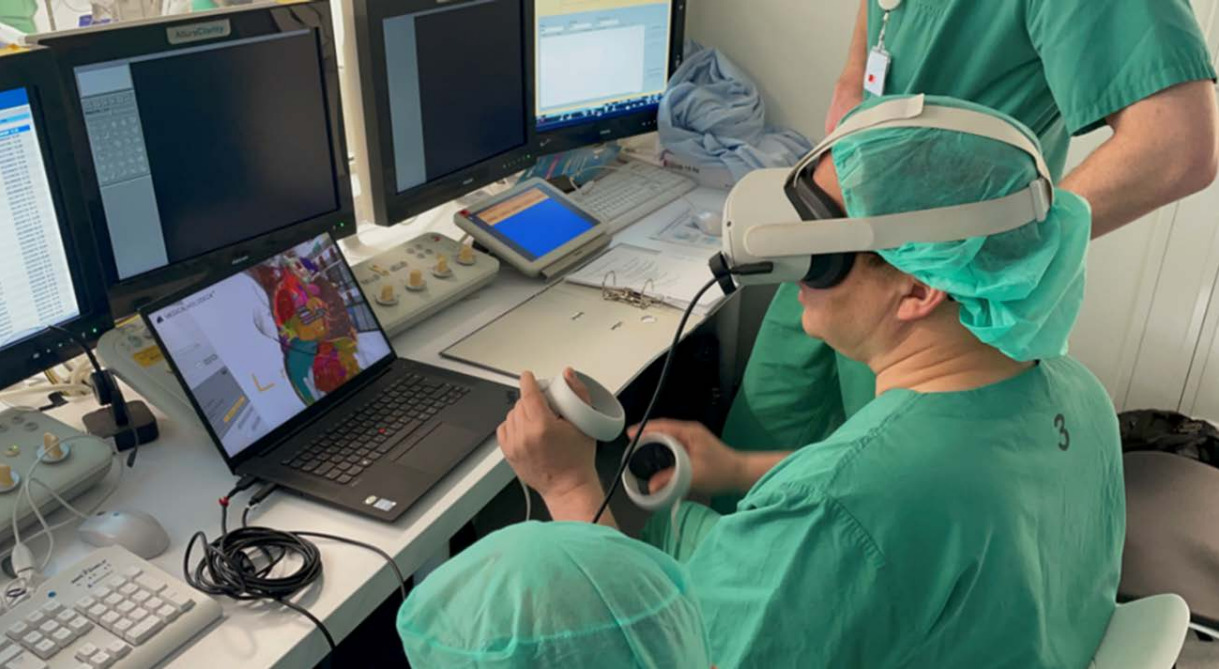
Dans sa présentation, le neurochirurgien Dr Galal Elsayed montre comment l’informatique spatiale peut changer cela. En combinant la planification préopératoire en VR avec la visualisation endoscopique peropératoire, les chirurgiens acquièrent une compréhension 3D claire de l’anatomie avant d’entrer dans le champ opératoire.
Les données CT et IRM spécifiques au patient sont explorées en réalité virtuelle afin de définir la voie d’accès optimale et d’anticiper les variations anatomiques. Pendant l’intervention, l’endoscopie fournit la vue réelle à travers le canal d’accès minimal. Ensemble, la planification et l’exécution forment un flux de travail spatial continu.
Cette approche réduit l’incertitude, facilite la navigation dans les colonnes complexes ou déformées et raccourcit la courbe d’apprentissage pour les jeunes chirurgiens. La perspective est claire : la planification VR intégrée, la chirurgie endoscopique et les flux de travail assistés par IA rendront les procédures mini-invasives plus précises et reproductibles.
L’informatique spatiale évolue de la visualisation vers le flux de travail chirurgical.
Pour plus d'informations, contactez info@medicalholodeck.com Mars 2026