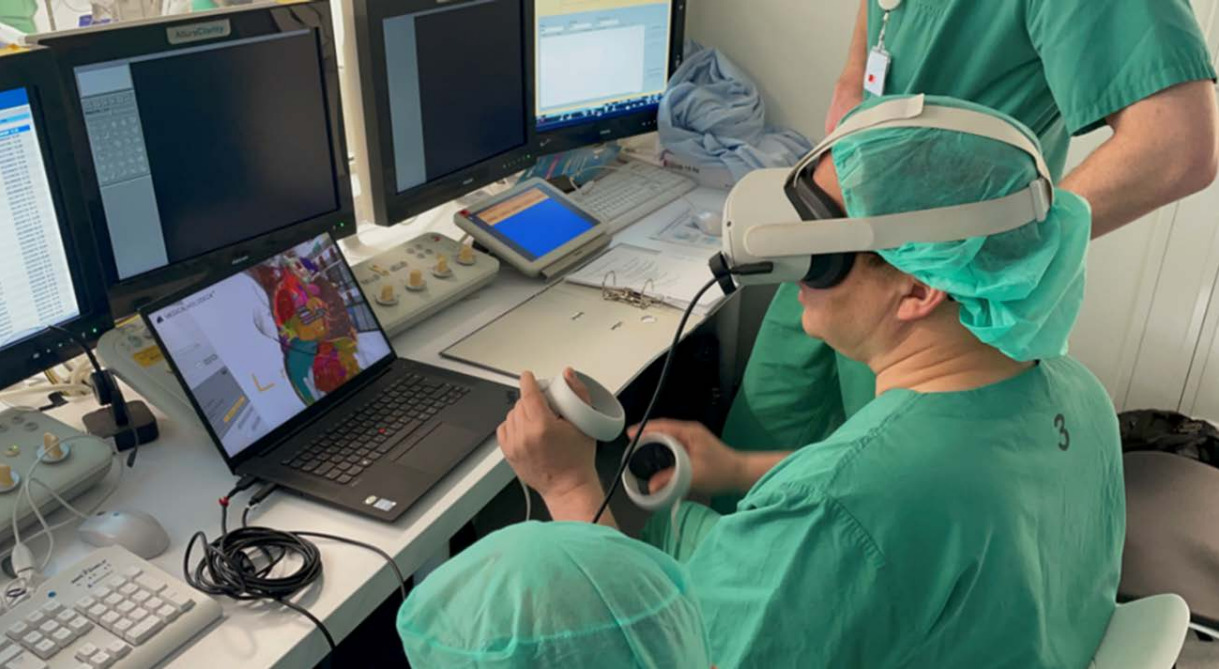
在他的演讲中,神经外科医生Galal Elsayed博士展示了空间计算如何解决这一限制。当外科医生在进入手术区域前以三维方式理解患者解剖结构时,术中导航变得更加可预测。沉浸式术前规划与内窥镜可视化相结合,形成了连接准备与执行的连续空间工作流程。
术前空间理解
CT和MRI通常在平面屏幕上查看,需要外科医生从二维切片中在脑海中重建三维关系。在MISS中,由于可见区域很小,这一认知过程更加困难。
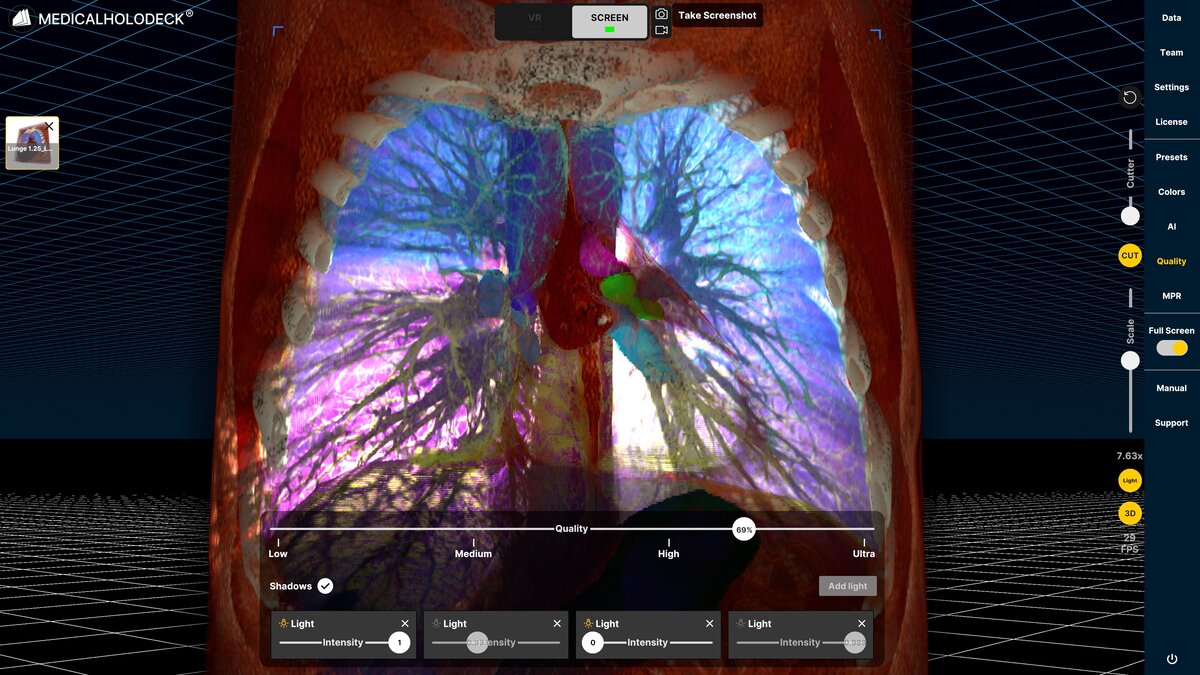
沉浸式可视化将患者特定影像转化为可在虚拟现实中探索的交互式3D模型。外科医生可以从任意角度检查椎体、椎间盘、关节和神经结构,模拟手术通道,定义入路点,并预测如畸形或移位碎片等变化。结果是一个清晰的空间计划:入路路径、需避免的结构以及为安全到达目标所需去除的骨或韧带范围。
术中内窥镜现实
内窥镜通过微创通道提供实时视野,但其本质上是局部的。一次只能看到很小的区域,定位依赖于外科医生的内部空间认知。
通过术前VR规划,该视图获得了上下文。外科医生能够了解可见范围之外的结构,以及当前视野与整体解剖的关系。内窥镜图像与先前探索的3D模型相匹配,即使在解剖改变或退化的脊柱中也能支持自信导航。

Galal A. Elsayed, M.D 是NewYork-Presbyterian/Weill Cornell Medicine的Och Spine神经外科助理教授,并担任Och Spine Queens微创脊柱外科主任。他的临床重点是脊柱手术中的先进技术,特别关注微创和影像引导的手术方法。
Elsayed博士还深度参与将扩展现实(XR)和空间计算整合到外科手术规划和教育中,开创了提升精确度和患者治疗效果的新途径。
连续的空间工作流程
关键创新在于整合。术前VR探索与术中内窥镜形成一个连续的空间体系:外科医生先在虚拟环境中导航解剖结构,然后在现实中重现这一路径。预期的解剖结构取代了术中的不确定性,这在复杂病例中尤为重要。
对培训和可重复性的影响
MISS需要高级空间推理能力。沉浸式规划使受训外科医生能够在手术前反复探索患者解剖结构,使其心理模型与术中视野对齐。这加速了空间理解并缩短了学习曲线。
标准化的3D规划也可能提高可重复性。当手术通道和目标在共享空间环境中定义时,方法对二维图像的个体解释依赖性降低,从而支持一致的结果和团队沟通。
迈向AI支持的微创工作流程
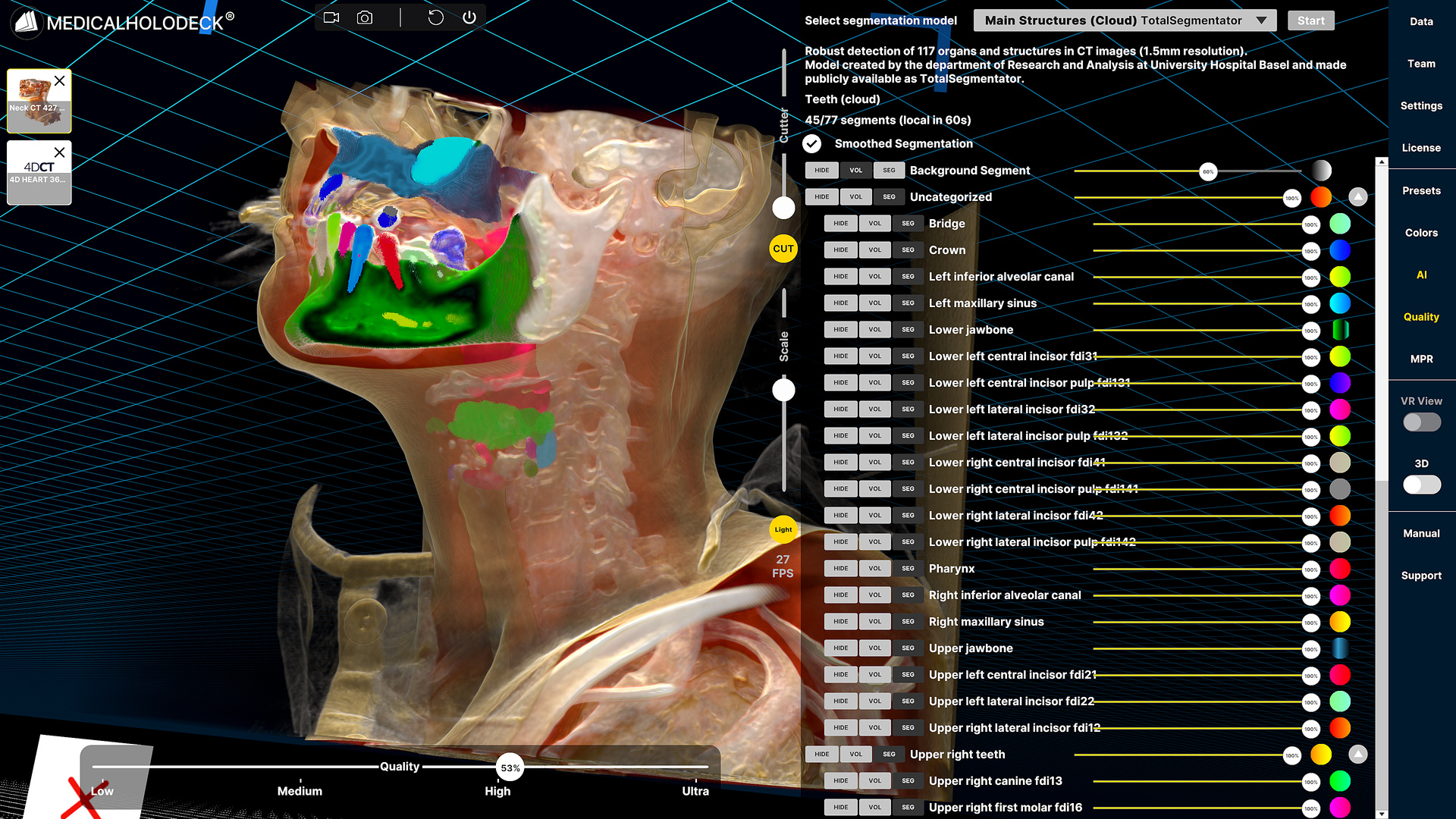
基于AI的分割可以自动识别CT和MRI中的椎体、椎间盘、神经和病变,加速3D模型生成并突出相关解剖结构。这实现了一个精简的工作流程:自动重建、沉浸式通道规划以及与规划路径一致的术中引导。
从可视化到手术工作流程
空间计算正从可视化工具转变为手术的操作组成部分。在MISS中,将VR规划与内窥镜执行相连接,可提供连续的3D解剖理解,减少不确定性并提高精度。
微创脊柱手术始终涉及狭窄通道。空间计算并不改变解剖结构,而是改变外科医生对其的感知和导航方式。在一个空间工作流程中整合规划与执行,指向更可预测且更易教学的微创脊柱手术。
微创脊柱手术通过极其狭窄的通道进行。空间定位受限,学习曲线陡峭。
在他的演讲中,神经外科医生Galal Elsayed博士展示了空间计算如何改变这一点。通过将术前VR规划与术中内窥镜可视化相结合,外科医生在进入手术区域前即可获得清晰的3D解剖理解。
患者特定的CT和MRI数据在虚拟现实中进行探索,以确定最佳入路并预测解剖变异。在手术过程中,内窥镜通过微创通道提供真实视野。规划与执行共同形成一个连续的空间工作流程。
这种方法减少了不确定性,支持在复杂或畸形脊柱中的导航,并缩短了年轻外科医生的学习曲线。前景明确:集成的VR规划、内窥镜手术和AI支持的工作流程将使微创手术更加精确和可重复。
空间计算正从可视化转向手术工作流程。
如需更多信息,请联系 info@medicalholodeck.com 三月 2026