彼の発表では、脳神経外科医のガラル・エルサイエド医師は、空間コンピューティングがこの制約にどのように対処するかを示しています。外科医が手術野に入る前に患者の解剖を3次元で理解していれば、術中ナビゲーションはより予測可能になります。没入型の術前計画と内視鏡可視化の組み合わせにより、準備と実行を結びつける連続的な空間ワークフローが生まれます。
術前の空間理解
CTやMRIは通常、平面ディスプレイ上で確認されるため、外科医は2Dスライスから3D関係を頭の中で再構築する必要があります。MISSでは可視範囲が非常に限られているため、この認知的プロセスは負担が大きくなります。
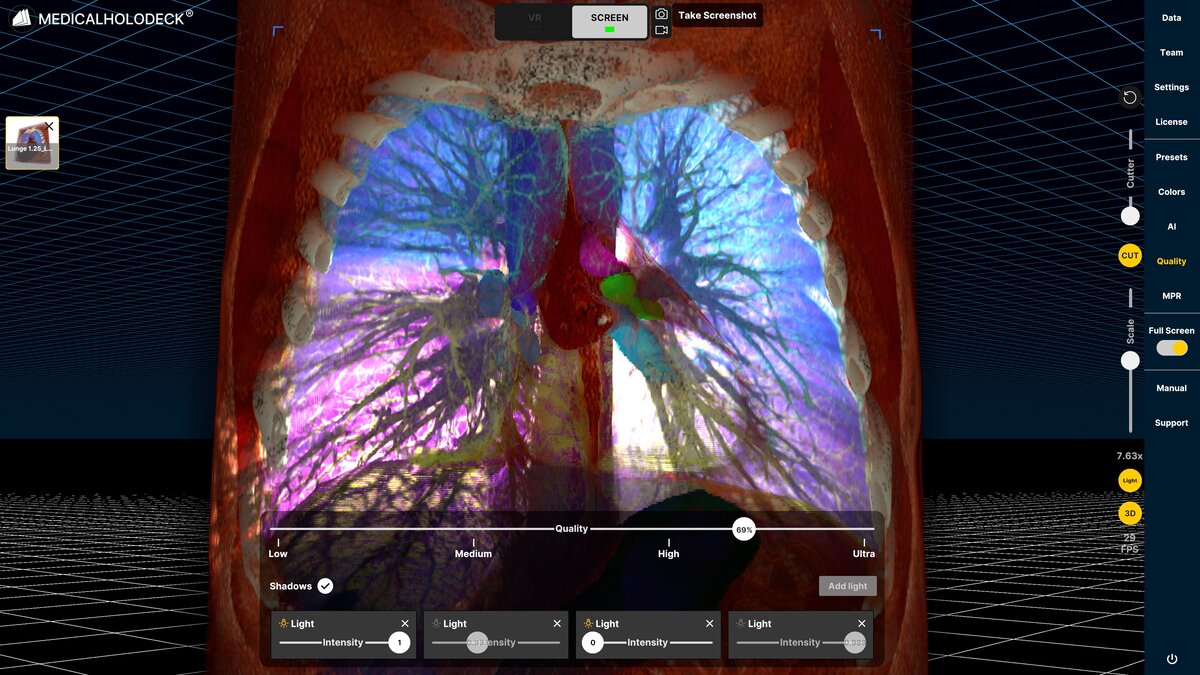
没入型ビジュアライゼーションは、患者固有の画像データをVRで探索可能なインタラクティブな3Dモデルに変換します。外科医は椎体、椎間板、関節、神経構造をあらゆる角度から確認し、手術経路をシミュレーションし、進入点を定義し、変形や移動した断片などの変化を予測できます。その結果、明確な空間的計画が得られます:アクセス経路、回避すべき構造、目標に安全に到達するために必要な骨や靭帯の切除範囲。
術中内視鏡リアリティ
内視鏡は最小侵襲のアクセス経路を通じてリアルタイムの視野を提供しますが、本質的に局所的です。一度に見える範囲は限られており、方向把握は外科医の内部的な空間マップに依存します。
事前のVR計画により、この視野に文脈が加わります。外科医は見えている範囲の外に何があるか、そして現在の視野が全体の解剖とどのように関係しているかを把握できます。内視鏡画像は事前に探索した3Dモデルと一致し、変形や変性のある脊椎でも自信を持ってナビゲーションを行うことができます。

Galal A. Elsayed, M.D NewYork-Presbyterian/Weill Cornell MedicineのOch Spineにおいて神経外科の助教授を務め、Och Spine Queensの低侵襲脊椎外科部長も務めています。彼の臨床の焦点は、先進的な脊椎手術技術にあり、特に低侵襲および画像誘導によるアプローチに関心を寄せています。
Elsayed博士は、拡張現実(XR)と空間コンピューティングを外科手術の計画と教育に統合することにも深く関与しており、精度と患者の治療成果を向上させる新たな方法を切り開いています。
連続した空間ワークフロー
重要な革新は統合にあります。術前のVR探索と術中の内視鏡は1つの空間的連続体を形成します。外科医はまず仮想的に解剖をナビゲートし、その経路を現実で再現します。予測された解剖構造が術中の不確実性に取って代わり、特に複雑な症例で有用です。
トレーニングと再現性への影響
MISSには高度な空間認識能力が求められます。没入型の計画により、研修中の外科医は手術前に患者の解剖を繰り返し探索でき、メンタルモデルを術中の視野と一致させることができます。これにより空間理解が加速し、学習曲線が短縮されます。
標準化された3D計画は再現性の向上にも寄与します。手術経路やターゲットが共有された空間環境で定義されることで、手法は2D画像の個々の解釈への依存度が低下し、一貫した結果とチーム内のコミュニケーションを支えます。
AI支援による低侵襲ワークフローへ
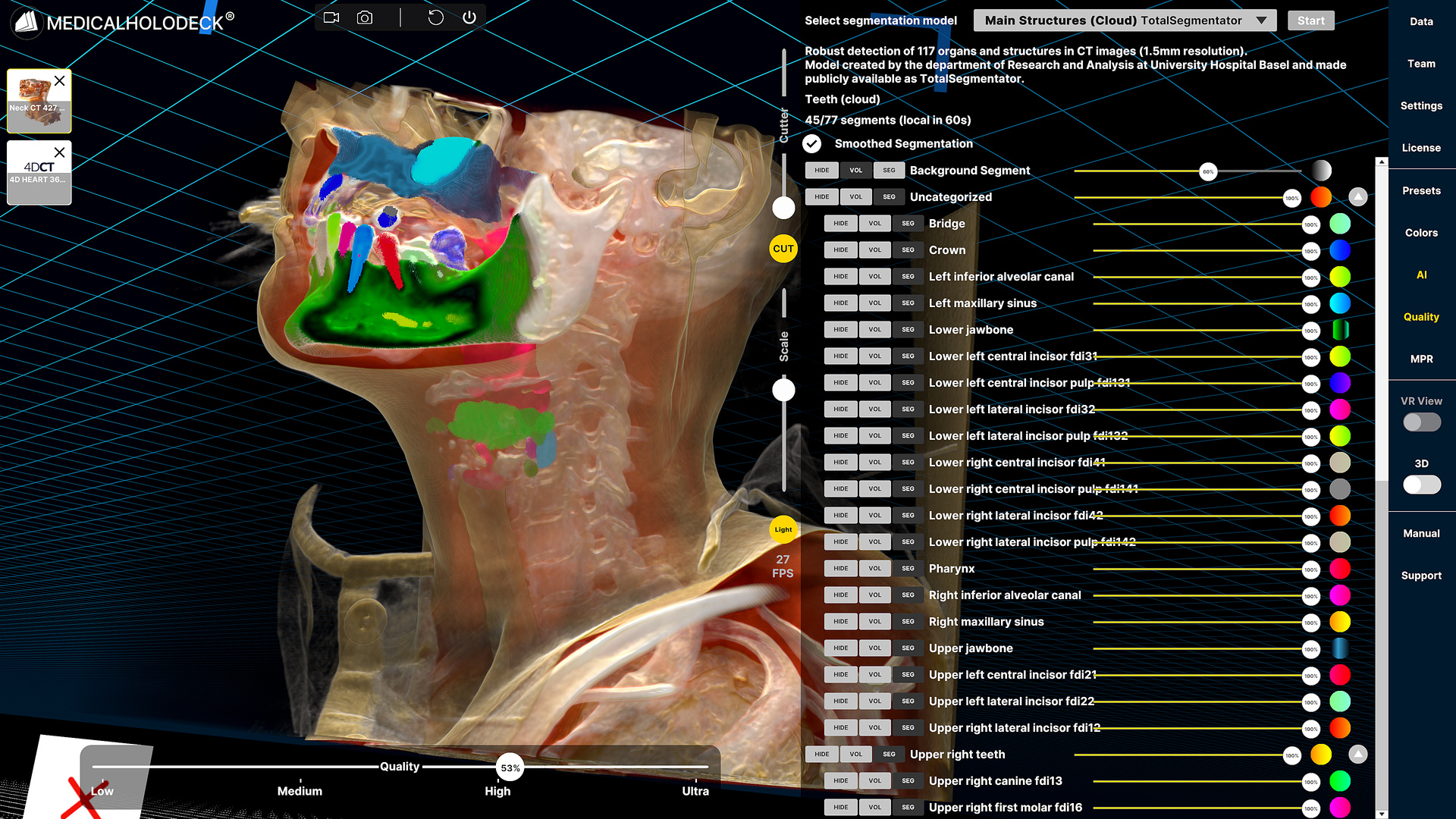
AIベースのセグメンテーションは、CTやMRIにおいて椎体、椎間板、神経、病変を自動的に識別し、3Dモデルの生成を加速し、重要な解剖構造を強調します。これにより、効率化されたワークフローが可能になります:自動再構築、没入型の経路計画、そして計画された経路に沿った術中ガイダンス。
可視化から手術ワークフローへ
空間コンピューティングは可視化から手術の実用的な構成要素へと進化しています。MISSでは、VR計画と内視鏡による実行を結びつけることで、解剖の連続した3D理解が得られ、不確実性が減少し精度が向上します。
低侵襲脊椎手術では常に狭い経路が伴います。空間コンピューティングは解剖自体を変えるのではなく、外科医がそれをどのように認識し、ナビゲートするかを変えます。計画と実行を一つの空間ワークフローに統合することで、より予測可能で教育しやすい低侵襲脊椎手術へとつながります。
低侵襲脊椎手術は非常に狭い経路を通じて行われます。空間認識は制限され、学習曲線は急です。
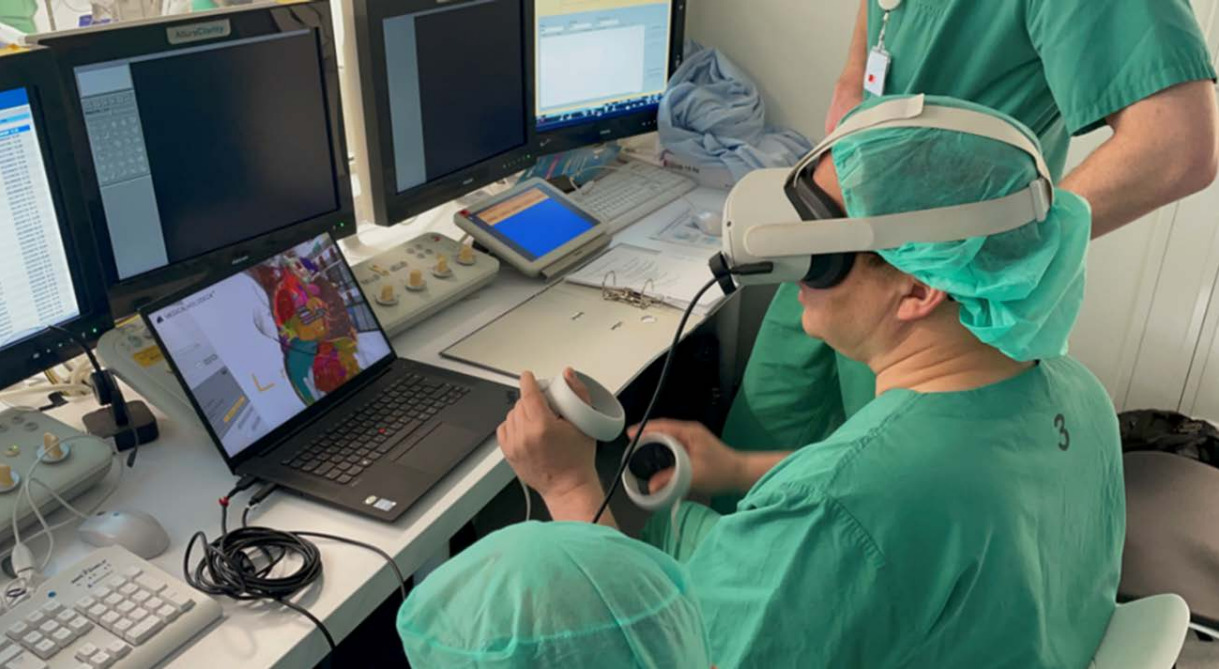
講演の中で、脳神経外科医のガラル・エルサイエド医師は、空間コンピューティングがこれをどのように変えるかを示しています。術前のVR計画と術中の内視鏡可視化を組み合わせることで、外科医は手術野に入る前に解剖の明確な3D理解を得ることができます。
患者固有のCTおよびMRIデータは、最適なアクセス経路の定義と解剖学的変異の予測のためにVRで探索されます。手術中は内視鏡が最小侵襲のアクセス経路を通じて実際の視野を提供します。これらが組み合わさることで、計画と実行が一体となった連続的な空間ワークフローが形成されます。
このアプローチは不確実性を低減し、複雑または変形した脊椎でのナビゲーションを支援し、若手外科医の学習曲線を短縮します。方向性は明確です:統合されたVR計画、内視鏡手術、AI支援ワークフローにより、低侵襲手術はより正確で再現性の高いものになります。
空間コンピューティングは可視化から手術ワークフローへと移行しています。
詳細については、以下にお問い合わせください info@medicalholodeck.com 3月 2026